

Product
-
Family of Static Variable Frequency Power Supplies for Electric Machine Testing
-
Family of Variable Frequency Converters and Inverters for Industrial Applications
-
Family of Variable Frequency Drivers for Permanent Magnetic Electric Machine
-
Family of Variable Frequency Power Supplies for Electrical Automobile Motor/Driver Testing
-
Family of Variable Frequency Converters and Soft Starters for Marine
PRODUCTS CENTER

-
Family of Static Variable Frequency Power Supplies for Electric Machine Testing
-
Family of Variable Frequency Converters and Inverters for Industrial Applications
-
Family of Variable Frequency Drivers for Permanent Magnetic Electric Machine
-
Family of Variable Frequency Power Supplies for Electrical Automobile Motor/Driver Testing
-
Family of Variable Frequency Converters and Soft Starters for Marine
ADD: 98 East Tieshan Road, Dalian Economic and Technical Development Zone, Dalian, P. R. China
TELL: 0411-87553077
FAX: 0411-87553019
EMAIL: ctr@centerole.com
Variable Frequency Drivers for Permanent Magnetic Electric Motor
这里是标题一h1占位文字

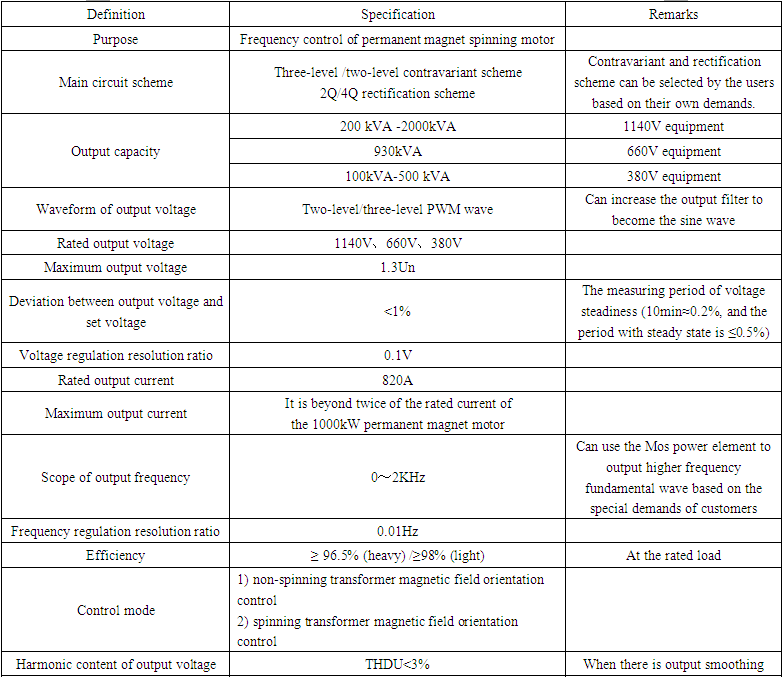
The Variable Frequency Drivers for Permanent Magnetic Electric Motor is an advanced product introduced by our company to meet the high-performance control of all kinds of permanent magnetic electric motors. Its range of application contains most high-challenge motor systems in the industry, e.g.: low-speed large-torque permanent-magnet synchronous motor and superspeed permanent-magnet motor, etc. These high-challenge systems respectively test the low-speed high-saturation magnetic field orienting level and the superspeed weak magnetic tape speed raising capacity. Through long time of on-the-spot industrial tests and constant promotion and running-in, this product has the advantages including mature technology, advanced property, good quality, low price, convenient use and qualified service, etc., and is welcomed by more and more users day by day.

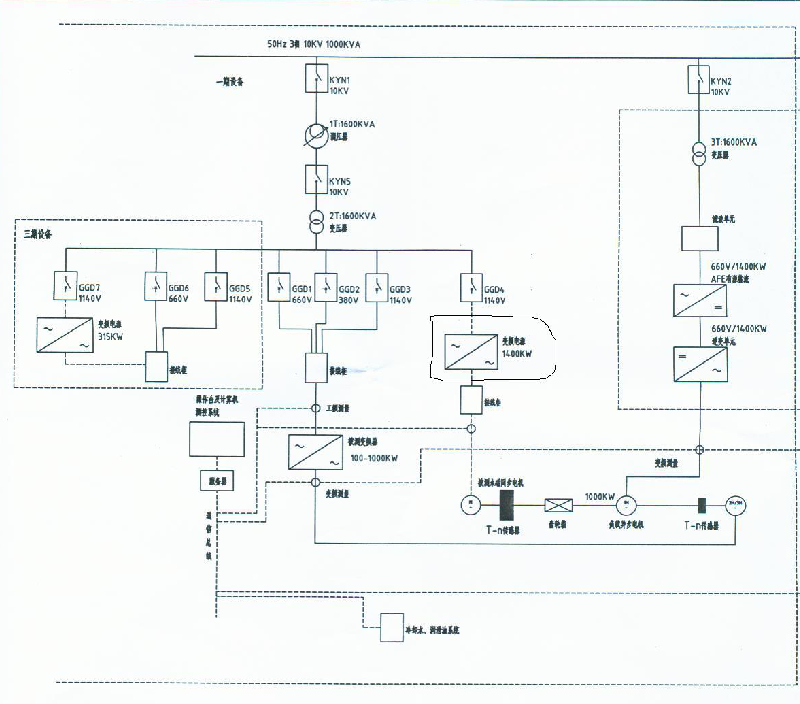
The Variable Frequency Drivers for Permanent Magnetic Electric Motor produced by CenteRole (Dalian) Electric Transmission Technology Co., Ltd. consists of 2 parts, the rectification and contravariant: the rectification part can be selected with the one-way energy system configuration (2Q rectification, that is, passive rectification) or the bothway energy system configuration (4Q rectification, that is, active rectification), among which the 4Q rectification provides steady and constant DC supporting voltage for the contravariant party, it is neither affected by the voltage fluctuation of the power grid nor the change in the load at the contravariant side. The contravariant side can be selected with the two-level contravariant structure or three-level contravariant structure, among which the output voltage of three-level contravariant structure is less, and it is more gentle for the motor system.
In the contravariant control mode, the controller has the non-spinning transformer mode and the spinning transformer mode at the same time, which can be suitable for different working conditions and customer demands. There is difference in the magnetic field orientation algorithm between the 2 modes, and the control loops of them are both vector control. There are 2 points that are worth emphasizing; 1. The magnetic field orientation algorithm of non-spinning transformer can be used no matter it is faced with the salient pole or non-salient pole permanent magnet synchronous spinning motor, and it can even continue guaranteeing the orientation precision of the magnetic field under the condition of low speed and large current saturation; 2. The decoupling configuration mode in the vector control algorithm can be adjusted based on the characters of the object, confirm that the torque ability and the flux-weakening overspeed ability of the motor can be sufficiently given a full play, and the electric efficiency of the motor should be improved as far as possible.
In addition, the algorithm of non-spinning transformer mode when selecting the spinning transformers modes can be regarded as the standby application when there is problem in the spinning transformer, and give the system a higher robustness and security.

- The three-level contravariant scheme is good for reducing the du/dt, promotion of motor efficiency and extension of service life of motors. Meanwhile the output electric energy of converter is of high quality, and the content of voltage harmonic is low.
- The 4Q rectification scheme can guarantee a steady and accurate voltage of the DC bus, it will not be affected by the voltage of the power grid and the fluctuation in load, and can guarantee the quality of contravariant voltage.
- No matter faced with the salient pole or non-salient pole permanent magnet spinning motor, the advanced non-spinning transformer magnetic field algorithm can both trace the accurate real-time direction of the magnetic field and guarantee that the decoupling of the vector control algorithm is accurate.
- The non-spinning transformer magnetic field orientation algorithm can work normally under the condition of low speed and heavy load saturation, it is suitable for the overload starting condition that is as twice as the low speed large torque permanent magnet spinning motor.
- The decoupling configuration mode in the vector control algorithm can be adjusted based on the characters of the object, confirm that the torque ability and the flux-weakening overspeed ability of the motor can be sufficiently given a full play, and the electric efficiency of the motor should be improved as far as possible.
- Can conveniently realize the dilatation of the converter.
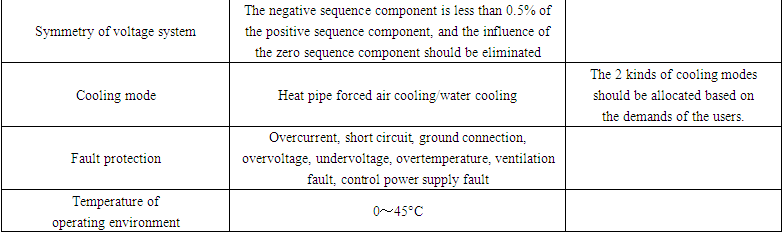
- The system has reliable software and hardware protection configuration through long term of engineering operation tests, and it can effectively protect the safety and reliability of the use.
- The whole converter is of compact structure and high power density.



See the explanation for the company performance.
Related Downloads
ADD: 98 East Tieshan Road, Dalian Economic
TELL: 0411-87553077
FAX: 0411-87553019
EMAIL: ctr@centerole.com
Copyright:CenteRole(Dalian)Electric Transmission Technology Co.,Ltd | Powerby:www.ceglobal.cn